
















XCD-210
多旋翼系列
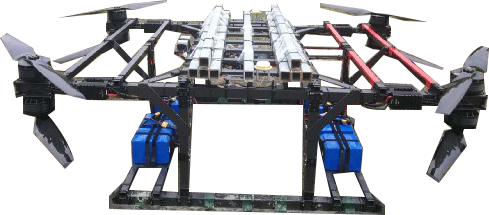
多旋翼无人机XCD-210采用了四轴八旋翼的构型,整体结构呈框架式构造,机体通过方形主体框架和横纵斜三个方向的拉杆和支撑相勾连,设计中摒弃了多旋翼无人机常见的悬臂梁结构,极大增强了结构强度与刚度。
-

四轴八旋翼
-

呈框架式构造
-

增强了结构强度与刚度
特性优势
性能参数
-


负载能力
≮90kg
-


飞行高度
≮50m
-


悬停稳定姿态
高度≮5m,指向精度≯0.5°,姿态≯0.5°
-


续航时间
满载条件下连续悬停时间≮12min
-


抗风性能
10.7m/s(5级)正常工作,13.8m/s(6级)安全降落
-


防雨性能
小雨等级(≯10mm/24h)正常工作,中雨等级(≯25mm/24h)安全降落
应用场景
-

金属目标物探查
-

任务装备投放
-

轻型物资投送
