Test Condition Construction and Evaluation
Application Overview
Using the characteristics of tethered UAVs or medium and large UAVs staying in the air for a long time, by carrying corresponding loads, an air interference support environment is constructed, which provides a realistic simulation of a complex electromagnetic environment close to the actual combat for the experimental training tasks, and provides a realistic simulation of the complex electromagnetic environment in the experimental training area. Large-scale uninterrupted monitoring of the electromagnetic environment and terminal area, real-time collection and storage of various electromagnetic signals in the environment, realization of target placement, real-time video transmission and playback, and support for the design, optimization and performance evaluation of experimental training tasks.












Application Scenarios
-

Building an air jamming support environment
-
Provide realistic simulation of complex electromagnetic environment close to actual combat for experimental training tasks
-

Continuous monitoring of the electromagnetic environment and end zone in the experimental training area
-

Real-time collection and storage of various electromagnetic signals in the environment
-

Realize the target
-
Real-time video transmission and playback
-

Scheme design, optimization and performance evaluation to support experimental training tasks
Package Product
-
 XCD-25A
XCD-25AXCD-25A
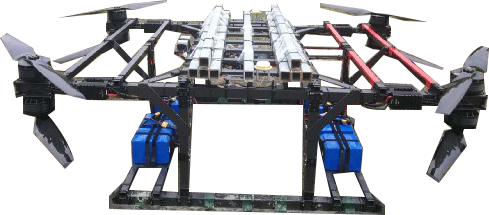
The flight platform adopts a multi-rotor configuration with four axes and eight ...
Learn More -
 XCD-45A
XCD-45AXCD-45A
The tethered multi-rotor UAV XCD-45 lift-off platform is deployed on a 6×6 all-t...
Learn More -
 XCD-210
XCD-210XCD-210
The multi-rotor UAV XCD-210 adopts the configuration of four-axis and eight-roto...
Learn More -
 XCD-18
XCD-18XCD-18
The multi-rotor UAV XCD-18 can be equipped with a battery-powered multi-rotor UA...
Learn More -
 GHQ-500
GHQ-500GHQ-500
GHQ-500 is a heavy-duty and long-endurance UAV with fully autonomous wheeled rol...
Learn More -
 GHQ-1520
GHQ-1520GHQ-1520
GHQ-1520 is a special aircraft based on the "unmanned" transformation ...
Learn More